FTC 2018 State Championship Robot
State championship revision of the 2019-2020 FIRST Tech Challenge robot.
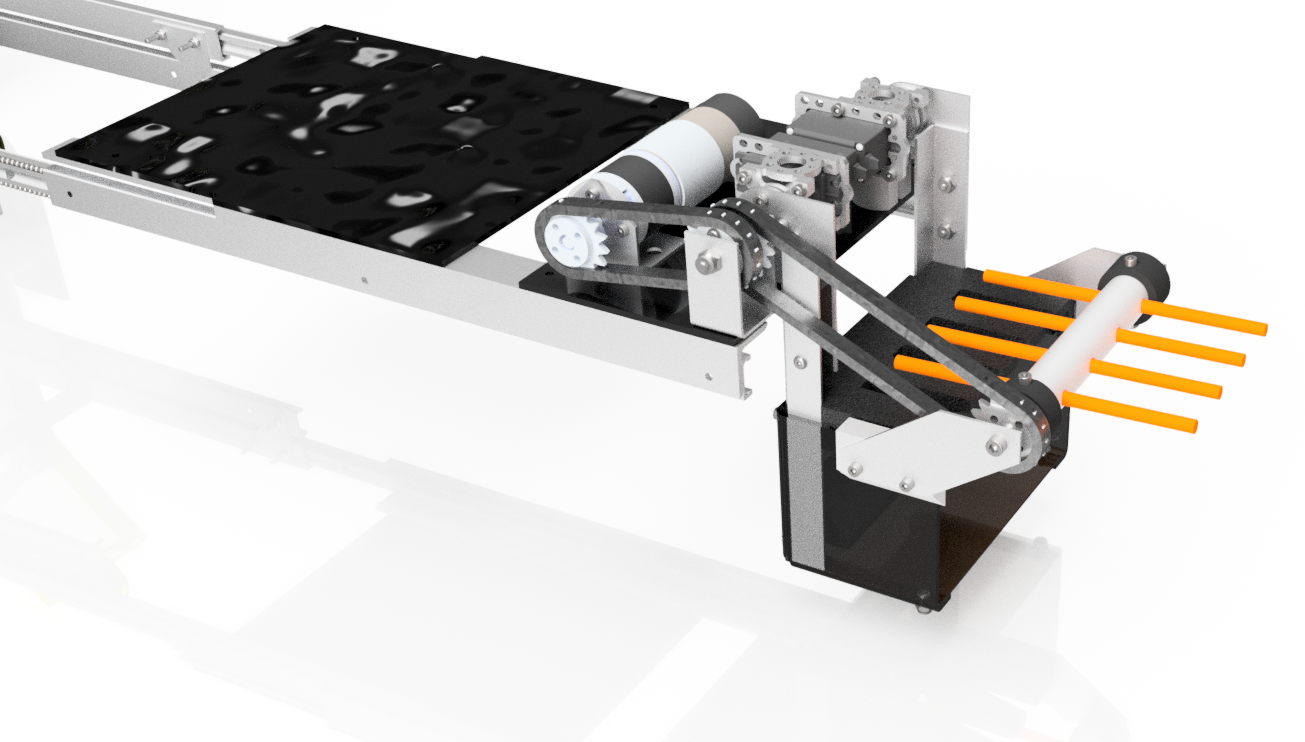
We decided to rebuild the intake mechanism, as the previous system’s complexity caused reliability issues, especially with fast movements during gameplay.
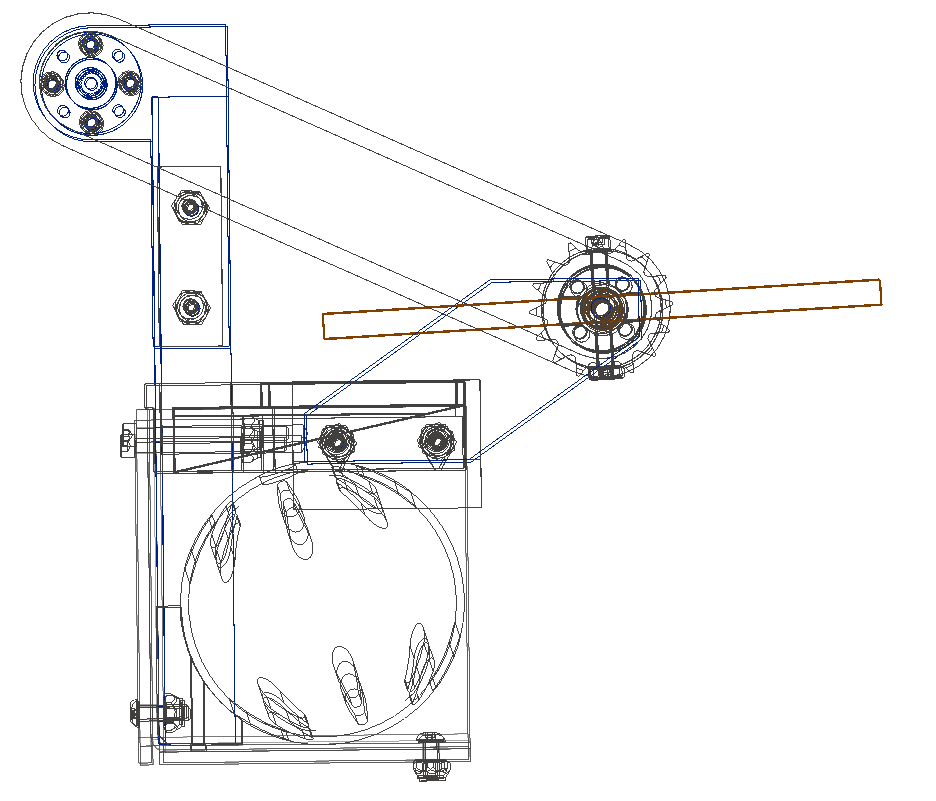
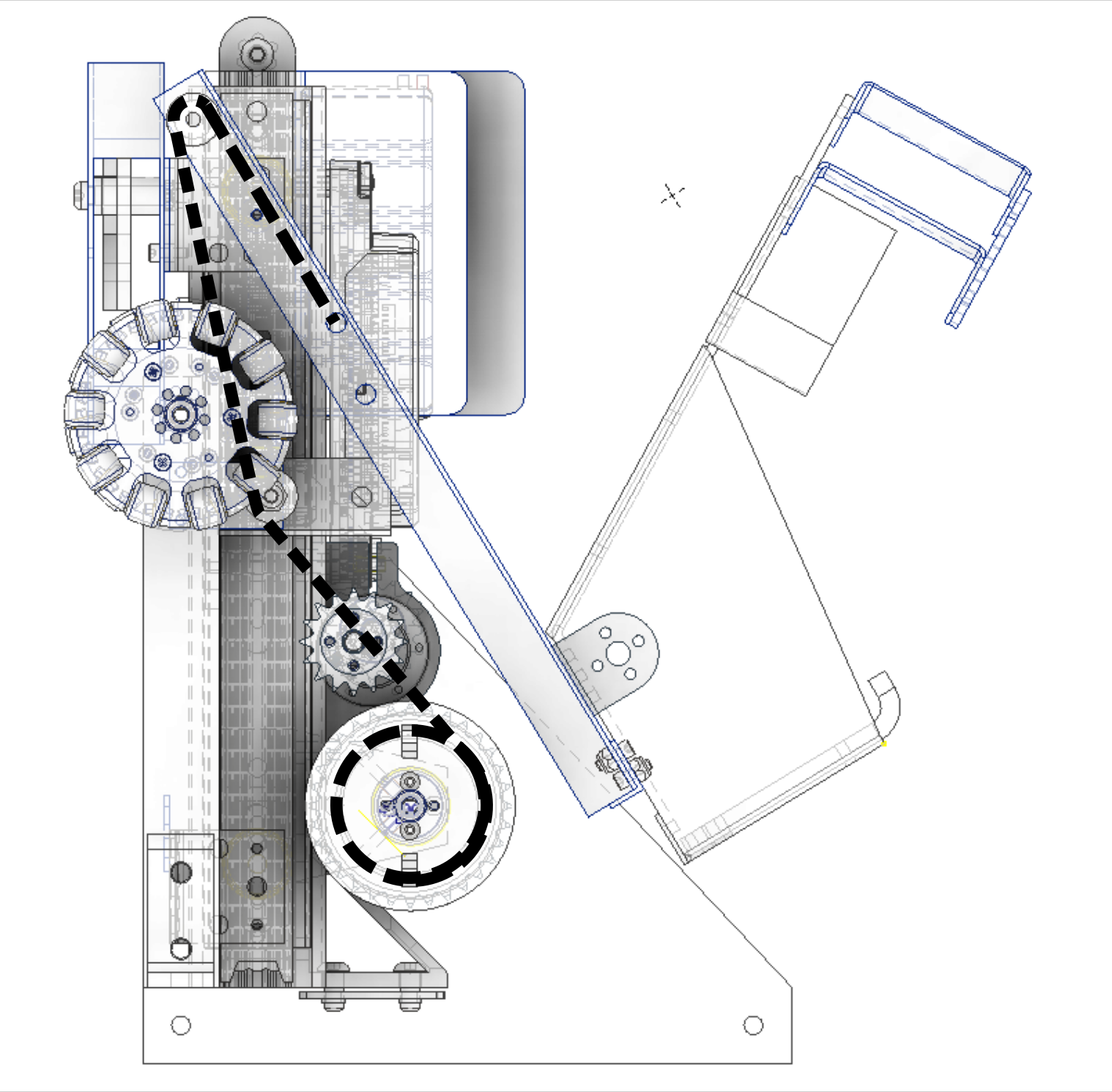
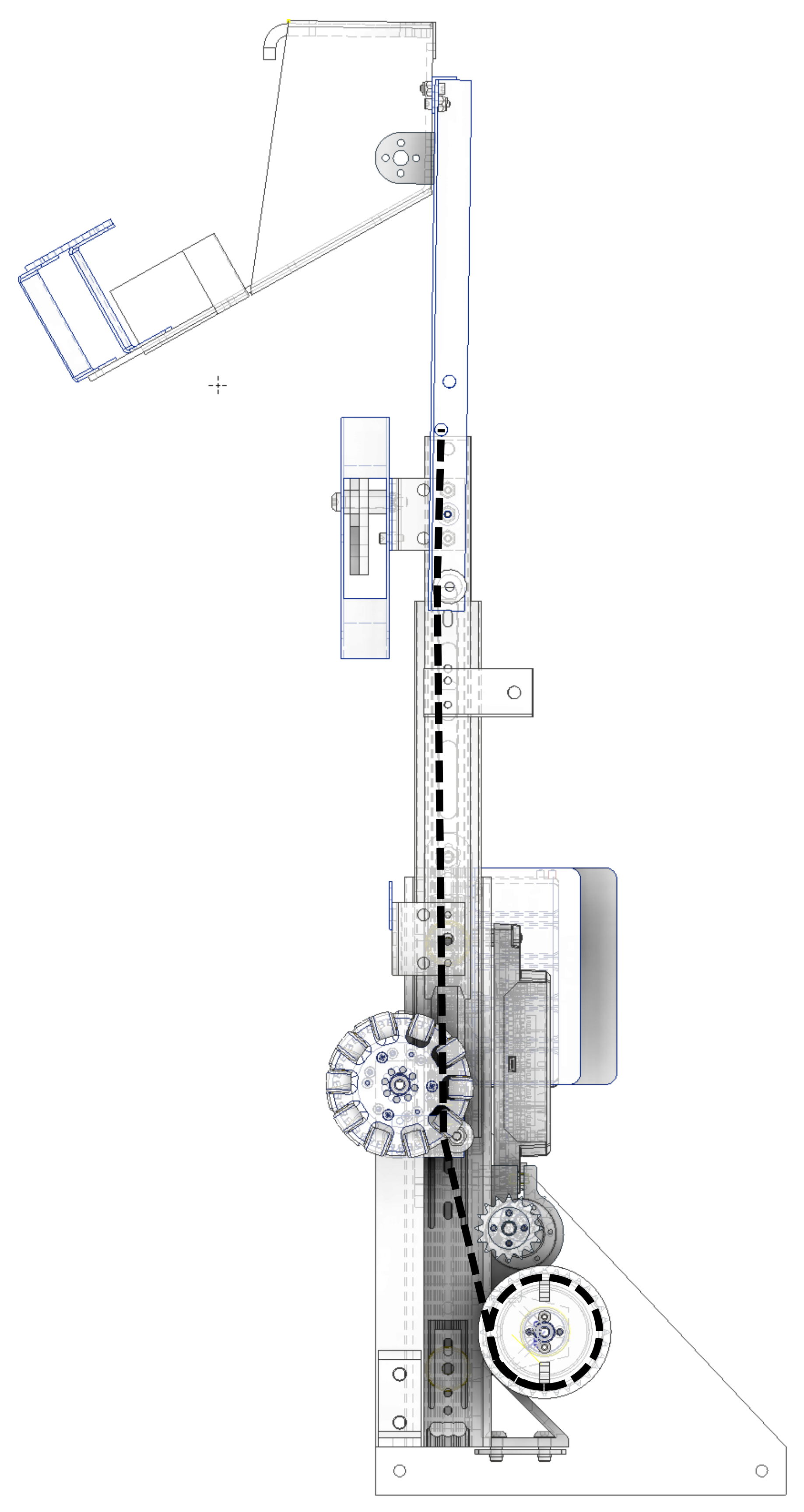
The servo motors available to us had very little torque; therefore, I had to reduce the intake’s moment of inertia. The drive motor for the intake spindle was relocated to a static position to make the intake as lightweight as possible.
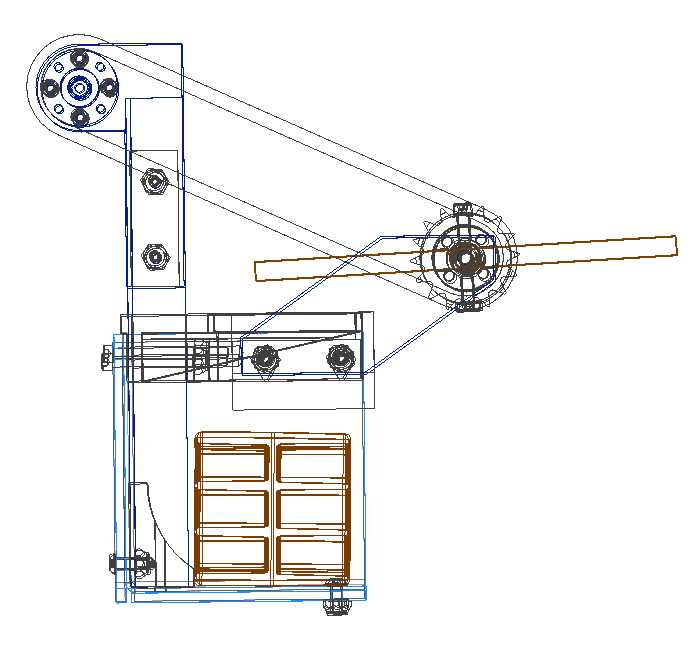
I also helped build the scoring mechanism to place scoring elements in designated bins. This mechanism used string to actuate to address motor count limitations.
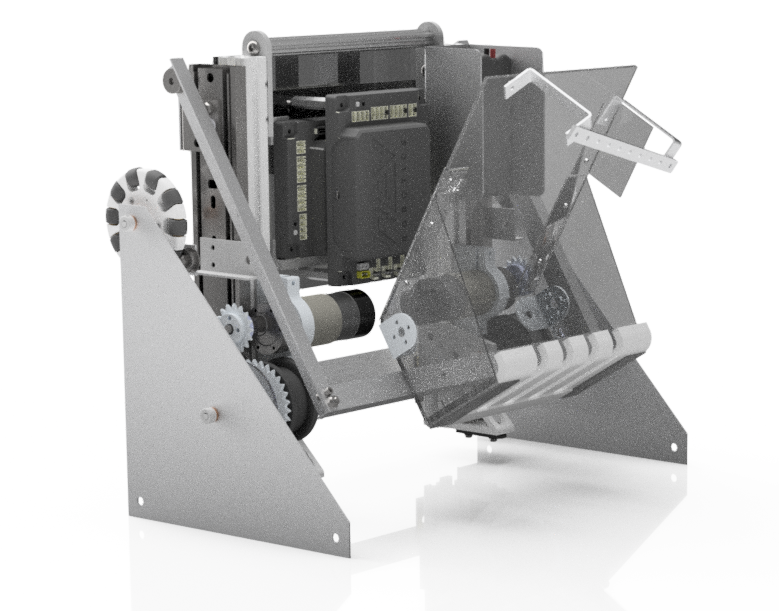
I was more confident in my fabrication skills at this point in the season, so the design utilized custom parts with complex bends and precise fitment. My CAD skills also improved significantly, with more accurate modeling for smoother fabrication. This robot allowed our team to reach Division Finals in the NJ FIRST Tech Challenge State Championship.
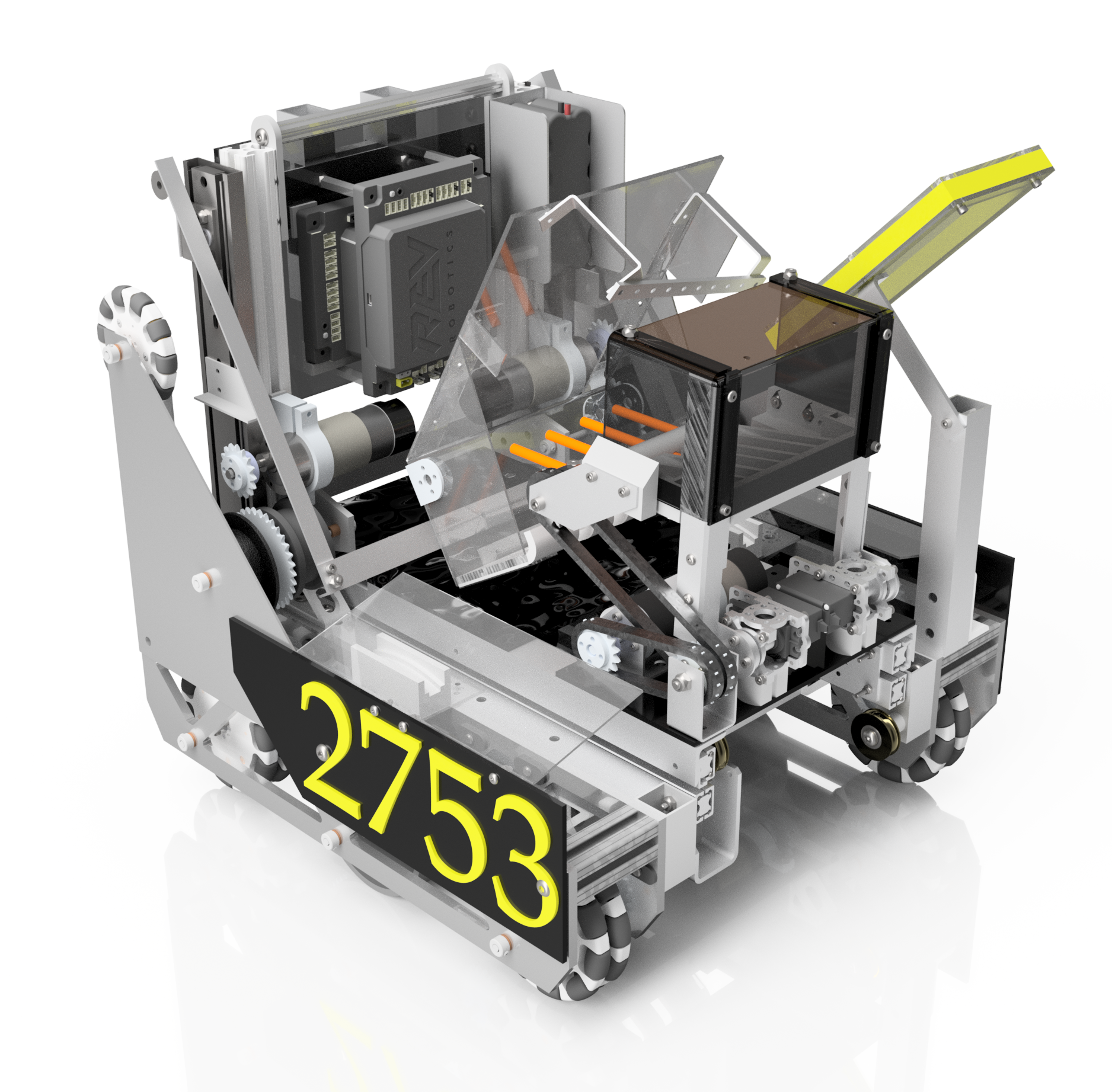
Gallery